
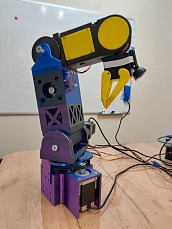
Робот-манипулятор с обратной оптической связью
Описание проекта
Робот-манипулятор с обратной оптической связью поможет решить следующие проблемы автоматизации в различных сферах производства/хирургии/обслуживания.
Робот-манипулятор с обратной оптической связью позволяет контролировать качество моделей, своевременно удаляя из области печати деформированные образцы и перезапуская процесс печати заново в отсутствии оператора. Автоматизация данного процесса позволит снизить материальные и временные затраты. Проблема является актуальной, поскольку до сих пор не решена, что делает разработку автономных систем контроля и коррекции печати перспективным направлением для исследований и внедрения в аддитивное производство. Робот-манипулятор с обратной оптической связью позволяет автоматизировать предоперационные и хирургические процессы, в которые входят, например, процесс наложение швов и забор анализов.
Грант федерального государственного бюджетного образовательного учреждения высшего образования «Саратовский государственный технический университет имени Гагарина Ю.А. для молодых ученых на выполнение краткосрочных практико-ориентированных научных разработок»
выделите фрагмент и нажмите
Ctrl+Enter
- Министерство науки и высшего образования Российской Федерации
- Публикация персональных данных
- Обращения граждан
- Закупки СГТУ
- Сведения о доходах, об имуществе и обязательствах имущественного характера руководителя и членов его семьи
- Психологическая помощь студентам
- Подключение к wi-fi
Чтобы оценить условия предоставления услуг используйте QR-код или перейдите по ссылке.
